




Kit de pilote de servomoteur AC 0,1 kw-1 kw, encodeur absolu magnétique EtherCAT CANopen 220V, servomoteur 400W 750W 1kw 40/60/80mm
551,92 €
✓ En stock — 19719 disponibles
Voir mon panier 0
🚚 Livraison gratuite —
livré en 7 jours environ
Expédié avec suivi de colis inclus.
En cas de retard ou de problème, nous vous remboursons intégralement.
🇫🇷 Vendeur français
💯 Remboursement garanti
🔒 Paiement sécurisé
Mis à jour : 26/02/2026
Description du produit
1 * servomoteur
Câble d'alimentation 1*3 mètres
Câble encodeur 1*3 mètres
Câble d'impulsion 1*1 mètre 5V/24V (juste pour pilote d'impulsion)
PS :
1.La longueur du câble peut être personnalisée.
2.Catalogue de produits :
Veuillez cliquer ici pour voir
3.Manuel d'utilisation du pilote :
Veuillez cliquer ici pour voir
Modèle de moteur
DB40-00330
DB60-00630
DB60-01330
DB60-01930
DB80-02430
DB80-03230
Bride (mm)
Puissance nominale (KW)
0.1
0.2
0.4
0.6
0.75
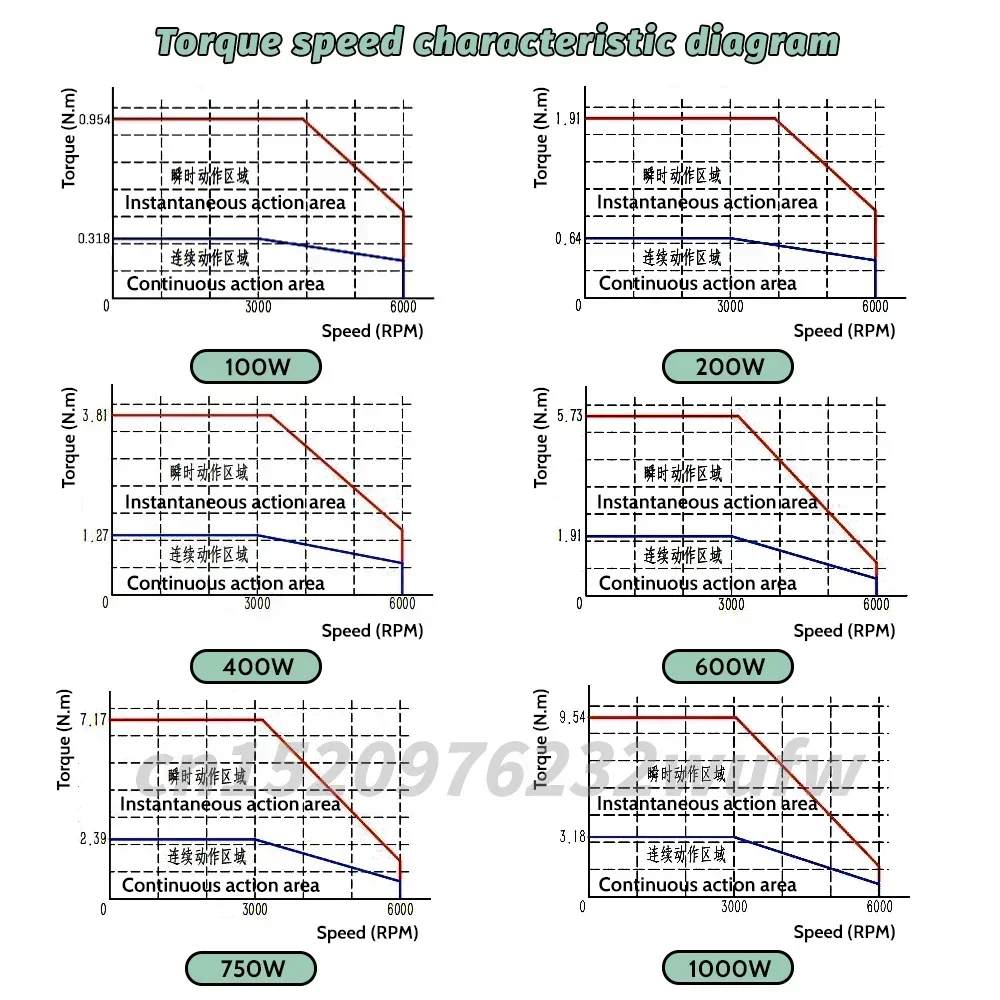
Couple nominal (N.m)
0.318
0.64
1.27
1.91
2.39
3.18
Couple MAX instantané (N.m)
0.954
1.91
3.81
5.73
7.17
9.54
Courant nominal (A)
1.1
1.7
2.5
3.6
4.7
5.8
Courant MAX instantané (A)
3.5
5.7
7.5
11.2
14.5
18.1
Force électromotrice inverse (V/Krpm)
Constante de couple (N.m/A)
0.29
0.38
0.51
0.53
0.51
0.55
Résistance de ligne (Ohms)
20.6
4.57
3.24
2.2
1.09
0.73
Inductance d'enroulement (filaire à fil) (mH)
10.3
4.3
5.8
4.3
4.6
2.7
Inertie du rotor (kgm 2)
0,06x10
0,28x10
0,52x10
0,76x10
1,48x10
2,27x10
Tension nominale (V)
AC 220
Vitesse nominale (rpm)
Vitesse de pointe (rpm)
Logarithme extrême
Niveau d'isolation
F(155
Type d'encodeur
Encodeur absolu monotour 17 bits
Encodeur absolu monotour 21 bits en option
Modèle de pilote
P100S-40
P100S-75
P100E-40
P100E-75
P100S-40-CAN
P100S-75-CAN
Puissance de sortie
0,1KW ~ 0,4KW
0,75 KW ~ 1 KW
0,1KW ~ 0,4KW
0,75 KW ~ 1 KW
0,1KW ~ 0,4KW
0,75 KW ~ 1 KW
Type
Impulsion
EtherCAT
CANopen
Alimentation d'entrée du circuit principal
Monophasé AC220V-15%~+10% 50/60Hz
Fonction de protection
Survitesse/surtension d'alimentation principale/sous-tension/surintensité/surcharge/anomalie de l'encodeur/anomalie de l'alimentation de contrôle/écart de position, etc.
Fonction de surveillance
Vitesse/position du courant/accumulation d'impulsion de commande/écart de position/couple du moteur/courant du moteur/état de fonctionnement, etc.
Sortie de contrôle
Servo prêt/servo alarme/positionnement terminé/freinage mécanique, etc.
Charge Applicable
Moins de 3 fois l'inertie du moteur
Opération d'affichage
Affichage numérique LED à 5 chiffres avec 4 boutons de commande
Méthodes de communication
RS485
EtherCAT
CANopen
Freinage à consommation d'énergie
Prend en charge à la fois intégré et externe
Interne/Externe
Mode de contrôle
0 : Méthode de contrôle de position ; 1 : mode de contrôle de la vitesse ; 2 : Méthode de contrôle du couple ; 3 : Méthode de contrôle hybride pour la position et la vitesse ; 4 : Méthode de contrôle hybride du couple de position ; 5 : Méthode de contrôle hybride du couple de vitesse
Mode de contrôle de position/mode de contrôle de vitesse/mode de contrôle de fonctionnement d'essai/mode de contrôle JOG/mode de contrôle de couple
Entrée de contrôle
1 : Servo activé, 2 : Alarme effacée, 3 : inhibition du lecteur CCW, 4 : inhibition du lecteur CW, 5 : réinitialisation du compteur de déviation, 6 : inhibition de l'impulsion de commande, 7 : limite de couple CCW, 8 : limite de couple CW, etc.
1 : Limite négative 2 : Limite positive 3 : Signal d'origine 4 : L'entranement CCW inhibe 5 : L'entranement CW inhibe 6 : Réinitialisation du compteur d'écart 7 : Inhibe l'impulsion de commande 8 : Limite de couple CCW 9 : Limite de couple CW
Contrôle de position
Méthode d'entrée
0 : Impulsion + direction
1 : impulsion CCW/CW
2 : Impulsion orthogonale biphasée A/B
3 : Contrôle de la position interne
Communication basée sur un bus
Rapport de transmission électronique d'entrée
Numérour de rapport de démultiplication : 1-32767
Démulateur du rapport de démultiplication : 1-32767
Précision de l'arbre du rapport de transmission : 1-131072 ; Précision du moteur du rapport de transmission : valeurs absolues de 17 et 23 bits
Signaux d'entrée et de sortie
8 signaux DI peuvent être utilisés pour les changements d'attribution du signal : activation servo, alarme d'effacement, inhibition de l'entranement avant et arrière, position du botier de vitesse zéro, commande zéro, inversion de commande, sélection de vitesse, sélection de couple, inhibition d'entrée d'impulsion, signal de retour zéro, sonde, limite avant, limite négative, etc.
Signal de sortie numérique
6 signaux DO peuvent être utilisés pour les changements d'attribution du signal : servo prêt, vitesse de l'alarme zéro, positionnement terminé et vitesse atteinte. Couple atteint. Frein électromagnétique, fonctionnement servo en cours, approche de positionnement, limitation de couple en cours, limitation de vitesse en cours
Produits similaires

5 pièces interrupteur à bascule robuste …
27,09 €

LED tactile lumière Mini sans fil …
14,16 €

Sac pour ordinateur Portable couverture souple …
18,88 €

JXVX 1-5pcs 502 colle forte instantanément …
9,74 €

Testeur de cylindre de moteur Hikity, …
73,92 €

Lunettes de Vision nocturne monture PC …
11,77 €

Protecteur d'écran pour BMW R1200GS R1250GS …
8,05 €

NJTY – détecteur de tension sans …
20,00 €